
AI [7]
nuscenes-devkit的使用
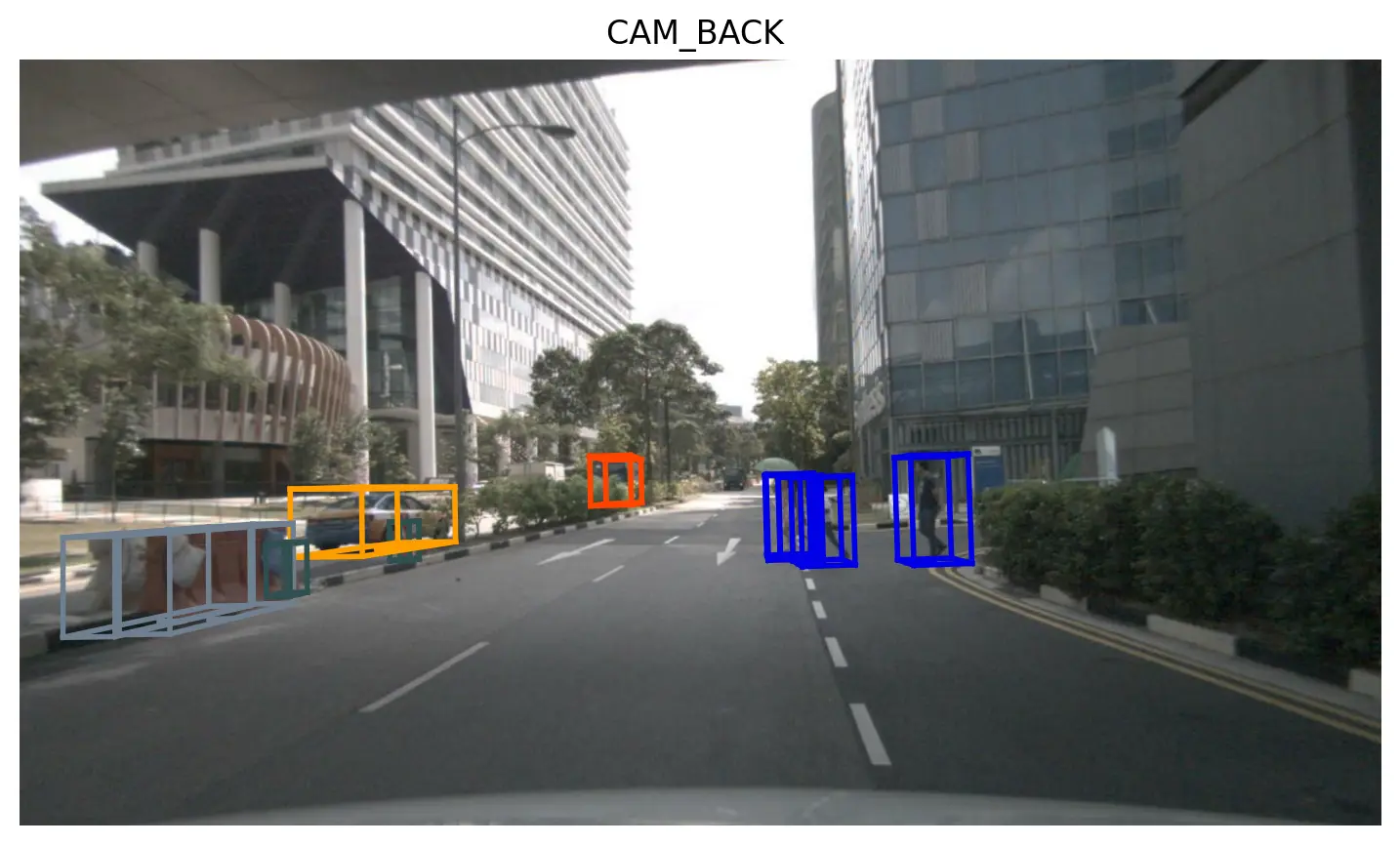
nuScenes数据集说明 - FunnyWii's Zone 一文了解nuScenes数据集的结构。 我们使用nuscenes-devkit进一步学习数据集的使用。 安装非常简单,建议python版本3.12和3.9。 pip install nuscenes-devkit devkit使用 仍以

nuScenes数据集说明
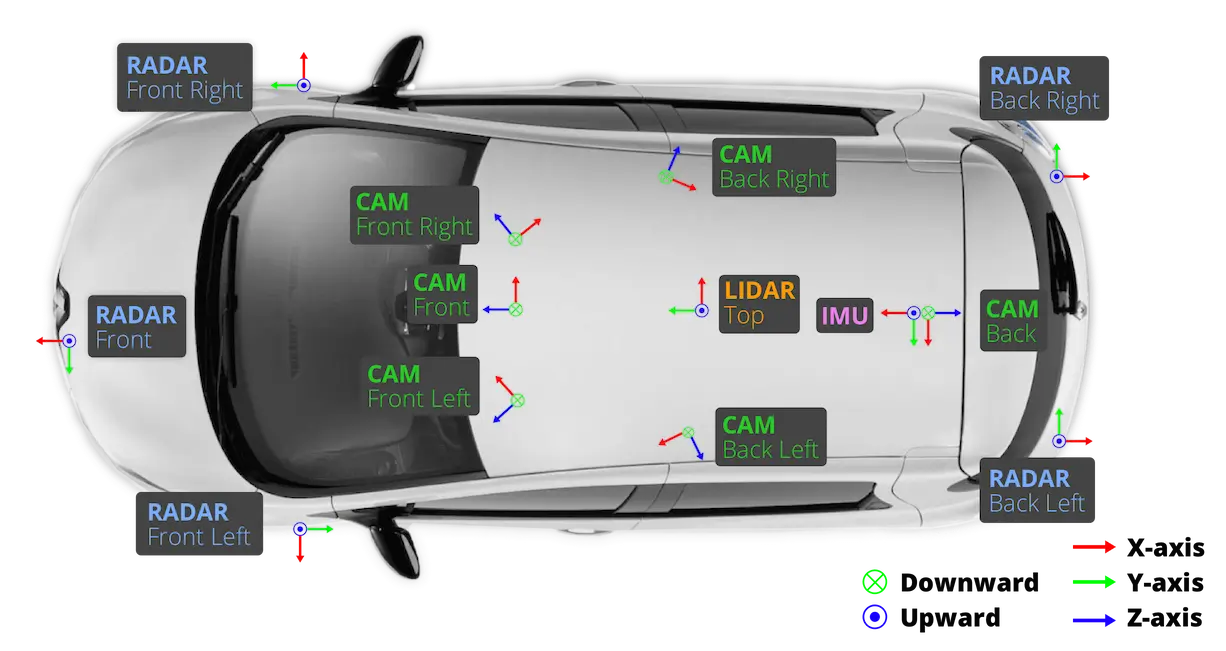
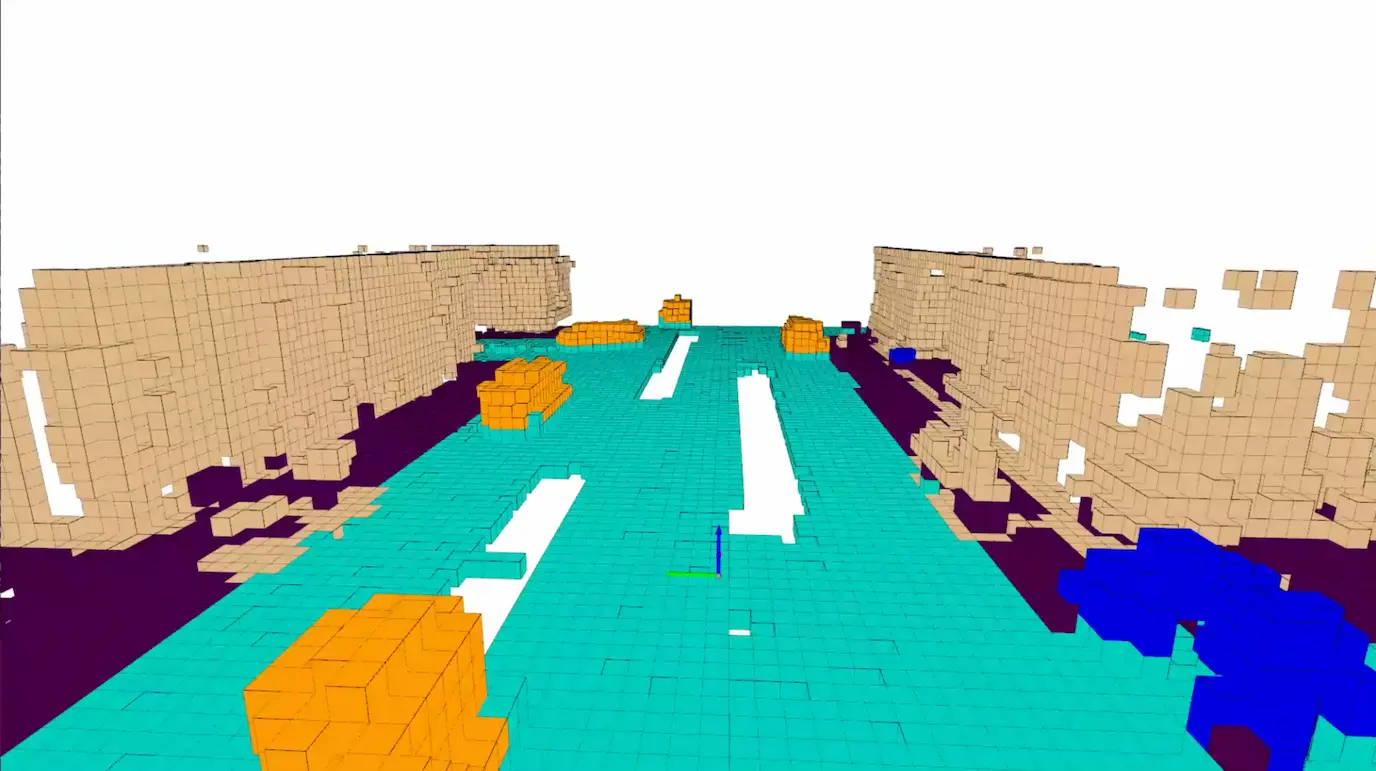
nuScenes数据集包含6个Camera,1个LiDAR,5个Radar,1个GPS以及IMU。 数据量比KITTI大得多,所以目前Occ Networks更多使用nuScenes数据集。 数据集分成两大块:Full和Mini。 Full Dataset包含140万Camera图像,39万LiDA
Ubuntu22部署FlashOcc踩坑实录
环境配置 conda create --name FlashOcc python=3.8.5
conda activate FlashOcc
pip install torch==1.10.0+cu111 torchvision==0.11.0+cu111 torchaudio==0.10.0 -f
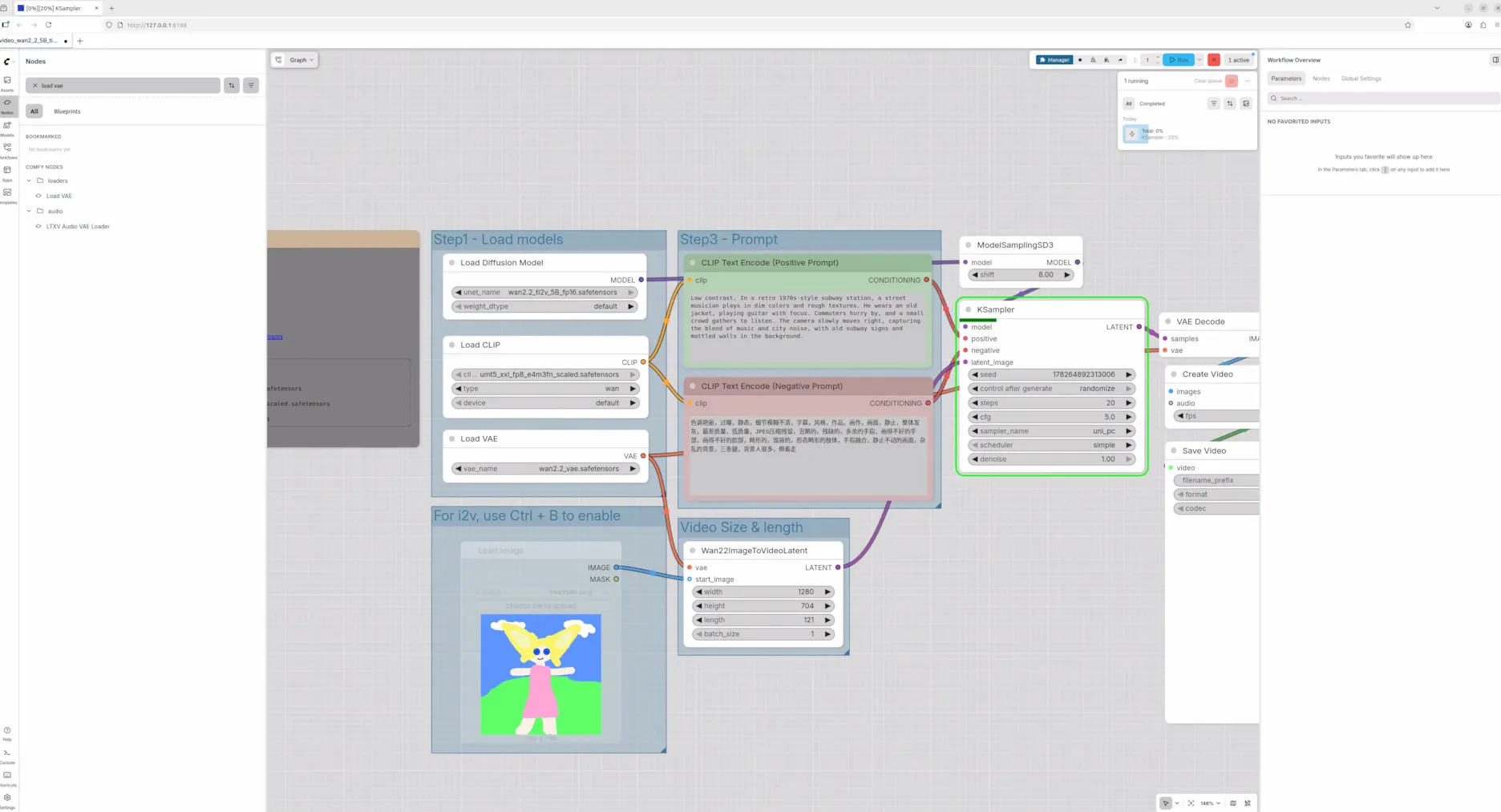
Ubuntu22.04部署Wan2.2
系统环境 系统:Ubuntu 22.04 显卡:RTX5880 48G 内存:64G PyTorch:2.4.0+ 模型说明 阿里巴巴旗下Wan团队开源的。 包括以下核心模型:

深度学习 - 网络的优化 Optimisation for Training Deep Networks
深度学习 - 网络的优化 Optimisation for Training Deep Networks 深度学习问题需要一个损失函数,我们的目标就是通过优化算法来最小化损失,即最小化目标(损失)函数。需要注意的是,优化和深度学习的本质目标有差异,优化关注的是最小(最大)化目标,深度学习更关注模型。

多传感器融合——后融合
多传感器融合的方案可以分成前融合(Early Fusion)方案和后融合(Late Fusion)方案。 前融合也叫特征级融合,不同传感器的数据会在特征级别进行合并,也就是说,不同模态的数据经过处理和合并后会得到一个特征集合。一般来说,每个模态数据的特征会被分别提取,然后被提取到的特征会被合并为一个

Windows11 4070Ti部署Deepseek
本来以为难度颇高,没想到还挺简单... 需要的软件就两个: ollama Chatbox AI 模型的部署 进入两个软件的官网并下载Windows版本,下载完成后安装。 使用win+R 呼出Windows的终端,然后进入ollama的模型页面,选择你需要使用的模型分支,b前的数字越大,模型参数越多,