Python[8]

Linux切换Python版本
软连接 一般Ubuntu系统中默认有两个Python,一个Python2.7,一个Python3.8。 这个可以在 /usr/bin 目录中找到: (base) jetson@ubuntu:~$ cd /usr/bin/
(base) jetson@ubuntu:/usr/bin$ ls pytho


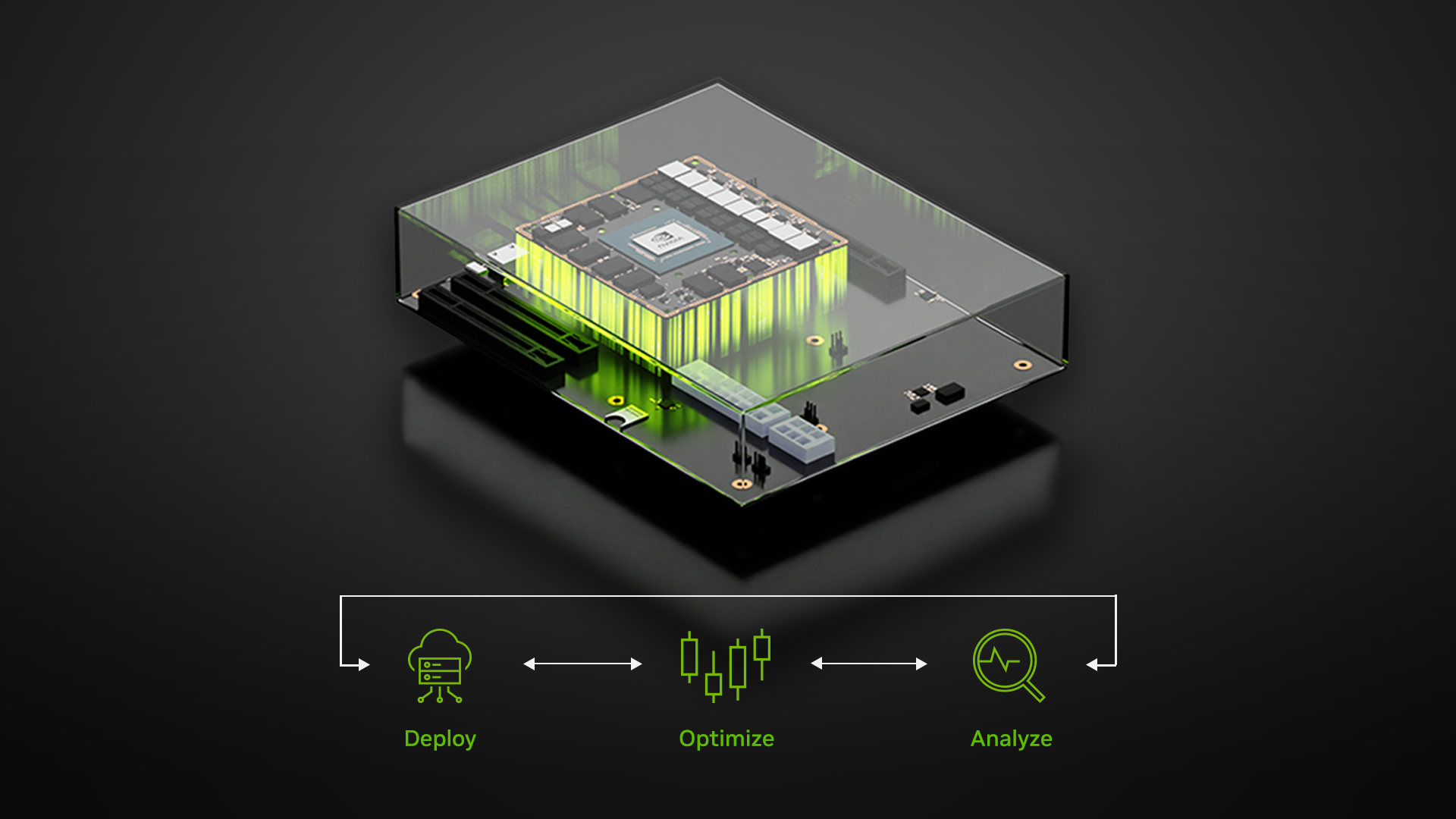
PCIe-GL26设备将GMSL相机图像发送至HOST端
PCIe-GL26 先看看 PCIe-GL26 是个什么设备 本质上是个自带 Jetson Xavier 系统,且带有6路GMSL2接口的图像采集卡。 GMSL2:Gigabit Multimedia Serial Link 2,注意这个和 GIGABYTE 技嘉科技 没啥关系……GMSL翻译一下就
OpenCV 的 remap() 函数中的 map1 和 map2
今天在 StackOverflow 上看到这么个问题:想把原图像中的一个点 g,通过内参和畸变参数映射到去畸变图像中的点 p,并获取这个点的坐标。 你以为我接下来会说:“xxx和我想的一样,但是我想错了,其实并不是这样....” 现在,我想说的只有“其实并不是这样”,因为我连map1和map2是啥我

使用Python控制海康球头相机运动的方法
控制海康球头的3种方法 做了一些调查,目前控制海康相机的方法主要有三种 海康SDK,目前海康提供了多个平台的SDK,包括Windows,X86Linux和ARM Linux(Jetson),见HiKSDK onvif,不过这个库是基于Python2做的,用起来会有些麻烦。 HTTP方式。 树莓派py

为ARM架构下的OpenCV添加FFMPEG支持
之前自己从未考虑过这个问题,每次在手动编译OpenCV的时候,cmake后面的 -D xxx对我来说只是添加了某个支持,但是我并不知道,OpenCV编译也是用 CMakeLists...而找到这些依赖是依靠 pkgconfig 工具和 *.pc文件。 文章最下方是我在编译OpenCV时使用的 cma

mmyolo目标检测之边用边学(笨鸟快飞边学边更版)
写在前面 为什么不直接输出一堆内容,主要是因为自己太菜了,上学时的那些深度学习知识,已经差不多都还给老师了,而且工程应用又是另一码事。所以我就一边用mmyolo框架训模型,一边从头学起。。。 快成炼丹师了,不过对如何调整hyperparameters一点头绪都没。以下提到的功能的使用,都可以在mmy
Jetson - ARM架构下的 torch 和 torchvision 的安装 (支持CUDA)
写在前面 ARM架构下的 torch 安装比较烦人,不是麻烦,而是烦人。 网络上大部分教程虽然写着“Jetson的torch安装”,不过基本都是用官方stable的whl安装,这些安装本身没有什么问题,但是官方ARM架构的torch并不支持 CUDA,torchvision 亦如是。 这个方法也并不

Python笔记(已经断更)
一些Python的知识点 啥是面向对象(OOP) 面向对象三要素封装、继承、多态 封装: 确标识出允许外部使用的所有成员函数和数据项,或者叫接口。有了封装,就可以区分内外,使得类实现者可以修改封装内的东西而不影响外部调用者。 继承: 继承有两种含义:其一是继承基类的方法,并做出自己的改变和/或扩展—