Point Cloud[12]

【重读经典】极坐标BEV方法
极坐标BEV的表示方法:在BEV空间按照角度和半径两个维度进行划分,而非笛卡尔坐标系下的均匀矩形网格。自车近处高分辨率,远处低分辨率,契合相机近大远小的成像特点。 核心优势 非均匀网格划分&分辨率优化 极坐标BEV以ego为中心,角度方向采用固定步长划分,径向长尾分布不均匀划分。 角度划分:θ ∈

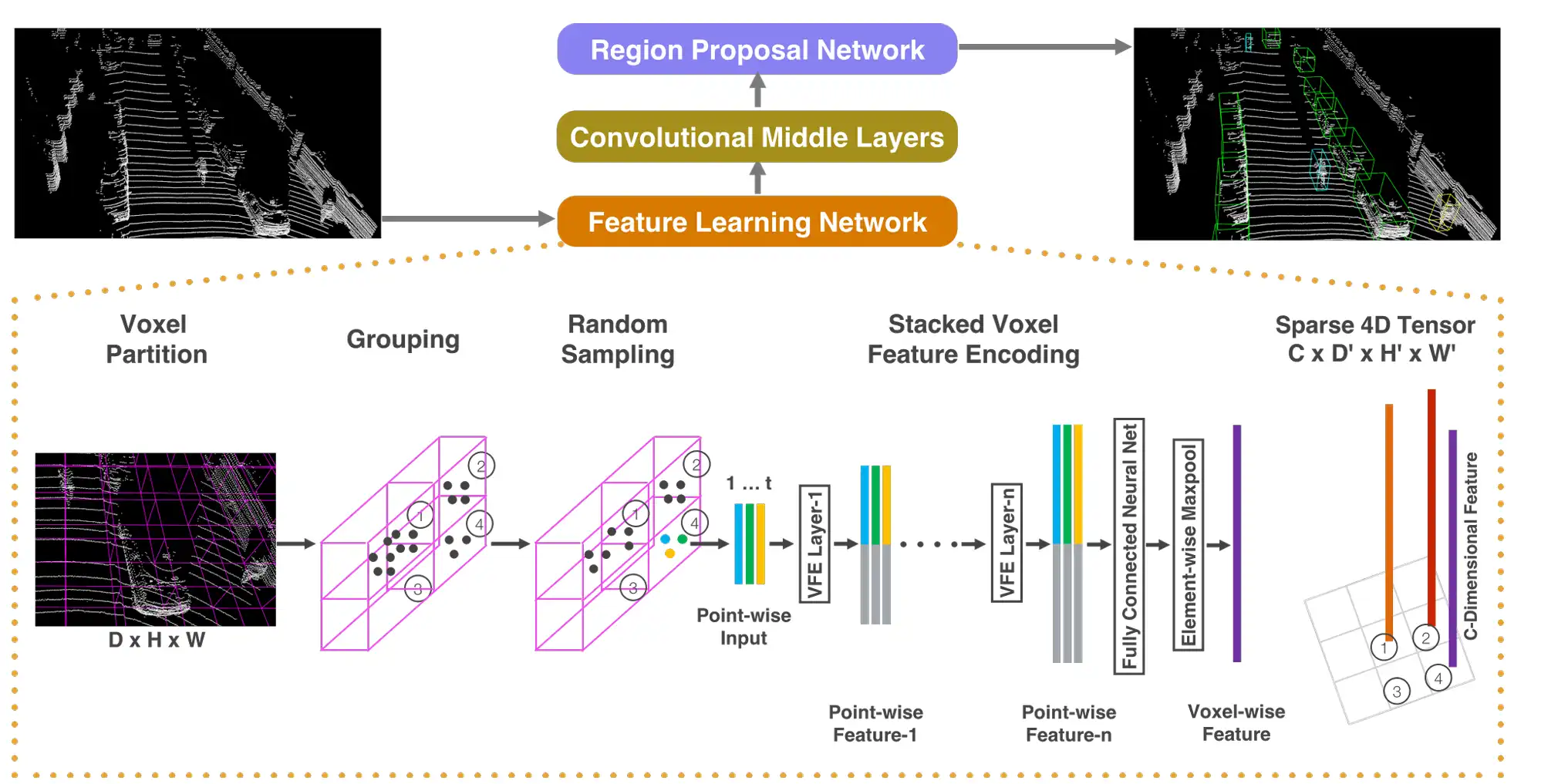
【重读经典】点云深度学习网络的范式变迁:PointNet, VoxelNet和PointPillars
PointNet 直接以 N×3N \times 3的Raw PointCloud作为输入,每个点使用 (x,
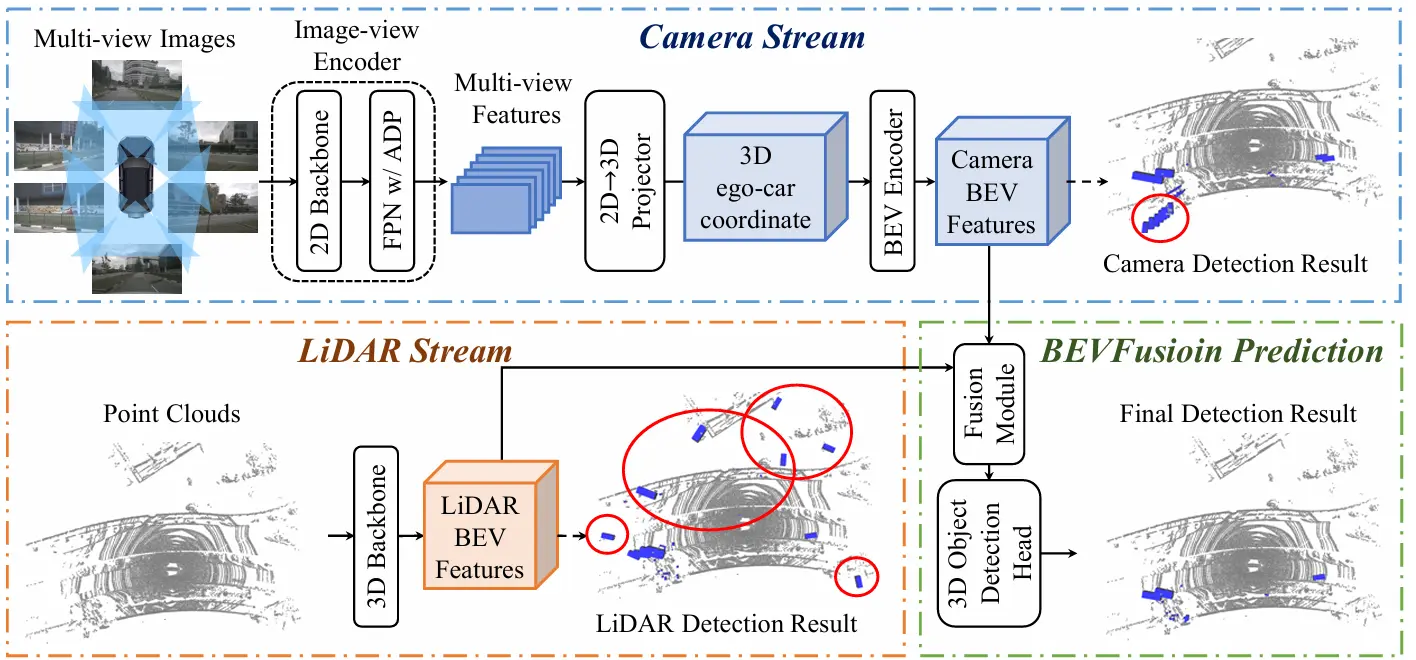
【重读经典】BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
BEVFusion有两篇论文: 一篇名为《BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework》,发表于2022年。 另一篇名为《BEVFusion: Multi-Task Multi-Sensor Fusion with Unif
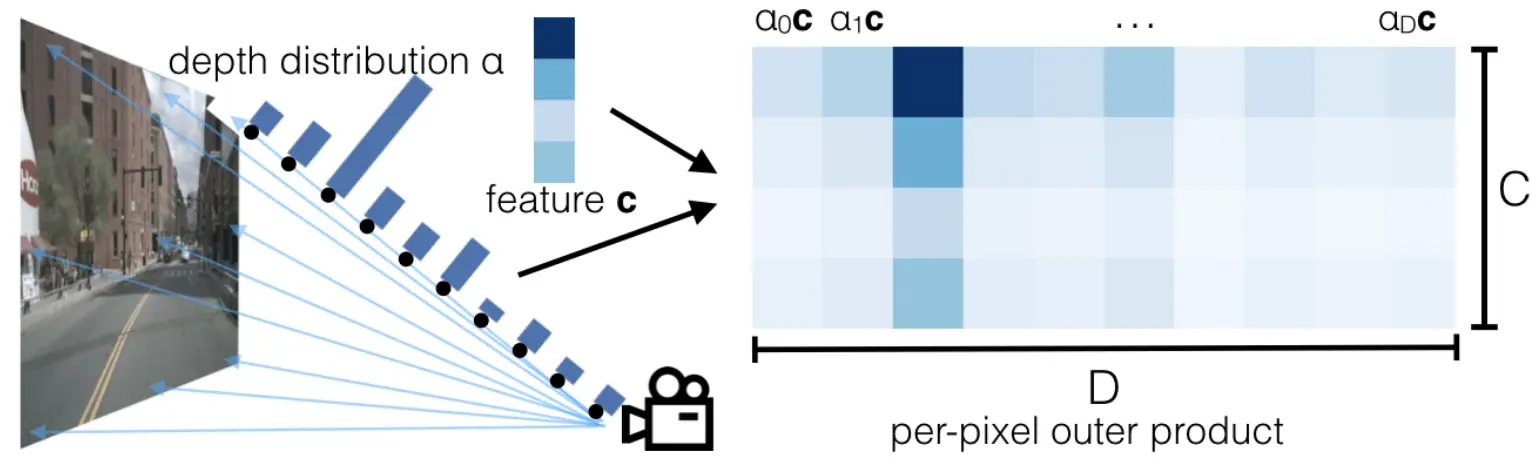
【重读经典】Lift, Splat, Shoot: Encoding Images From Arbitrary Camera Rigs by Implicitly Unprojecting to 3D
LSS 是 NVIDIA 在 ECCV2020 上发表的文章。 关于论文标题中 Lift, Splat, Shoot 三个单词的理解,这三个单词对应模型中三个核心步骤。 Lift:提升。2D 图像特征提升到 3D 视锥空间特征。 Splat:泼溅。所有相机生成的 3D 视锥特征,泼洒到统一的 BEV

Livox格式的rosbag转为PointCloud2格式
参考文章前两篇是 CSDN 的,又一次让我见识到 CSDN 的文章质量之低了。 写这篇文章的目的,是 Livox LiDAR 发布的格式是 CustomMsg,没有办法用 rviz 直接可视化,必须重新发布为 PointCloud2 格式或者使用 C++ 通过驱动直接解析。 安装 先编译并安装 Li



PCL入门笔记 - PCL 1.13.0 的安装和配置(Ubuntu 20.04 LTS)
介绍了作者是个傻逼这件事。
同时介绍Ubuntu系统下如何安装PCL和VTK,以及它们的测试方法

MATLAB对点云数据(.pcd)的处理
前言 本文内容是针对 .pcd 格式的点云进行处理。 文中模型出自 TU Wien 采集的佛头模型[2]。 相关函数和算法 pcd格式点云文件读取 ptCloud
pcshow(ptCloud)
Figure 1.1 佛头点云的可视化 对于 pcshow() 函数,默认显示点云为渐变色。且每个点的

PCD转PLY格式 & 点云表面重建
随便写点 最近在学 PCL,关于网上很多使用 PCL 将 PCD 转 PLY 格式的内容,不能说有错,因为文件的 header 确实被正确的修改,也能被读取。 但是存在一个问题:PLY 的 header 中,element face 的数量依然是 0。这是因为那些转换方式不是一个表面重建的过程,PC