
前言
本文内容是针对 .pcd 格式的点云进行处理。
文中模型出自 TU Wien 采集的佛头模型[2]。
相关函数和算法
pcd格式点云文件读取
ptCloud
pcshow(ptCloud)
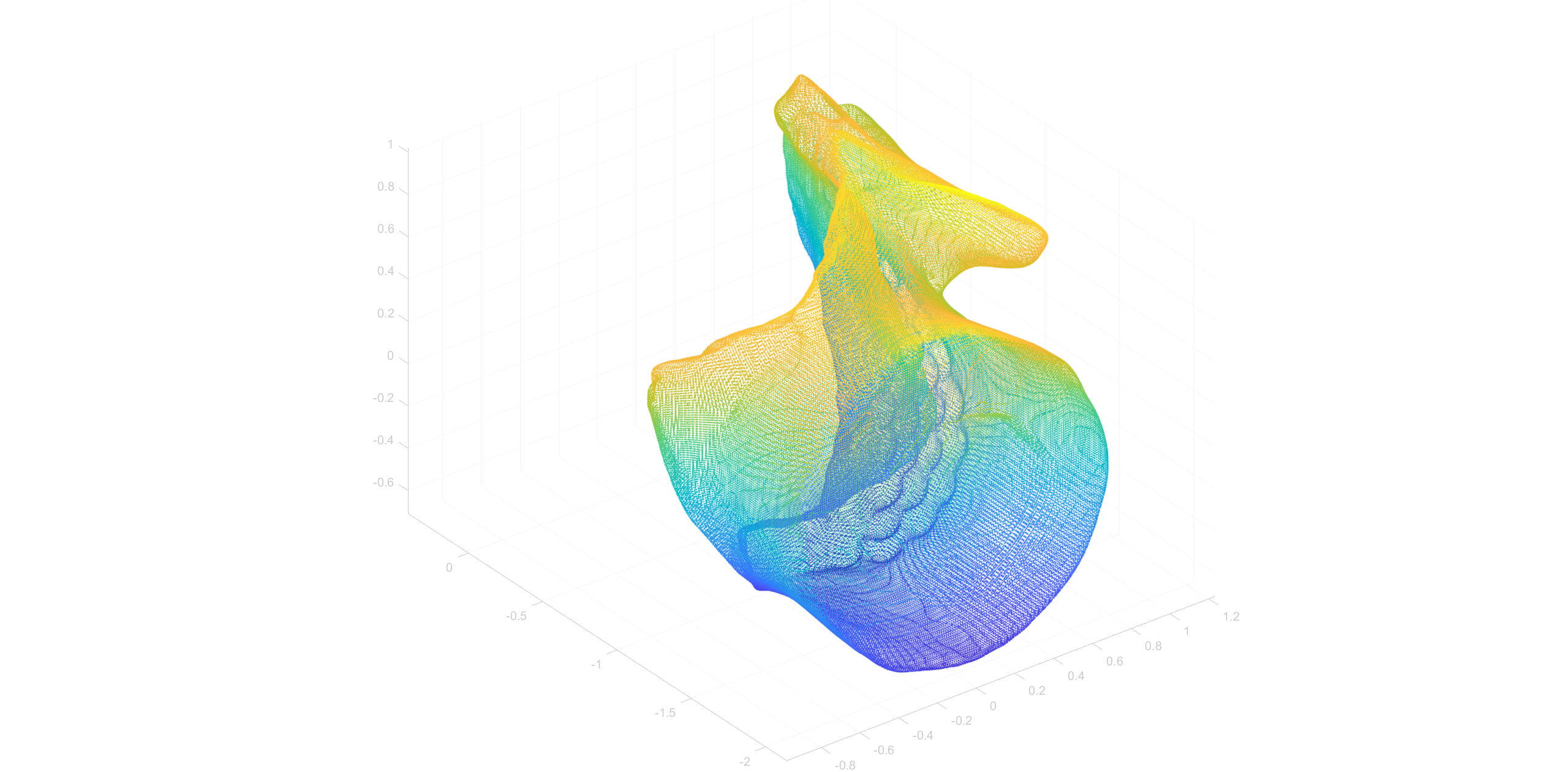
对于 pcshow() 函数,默认显示点云为渐变色。且每个点的尺寸为默认为 6。
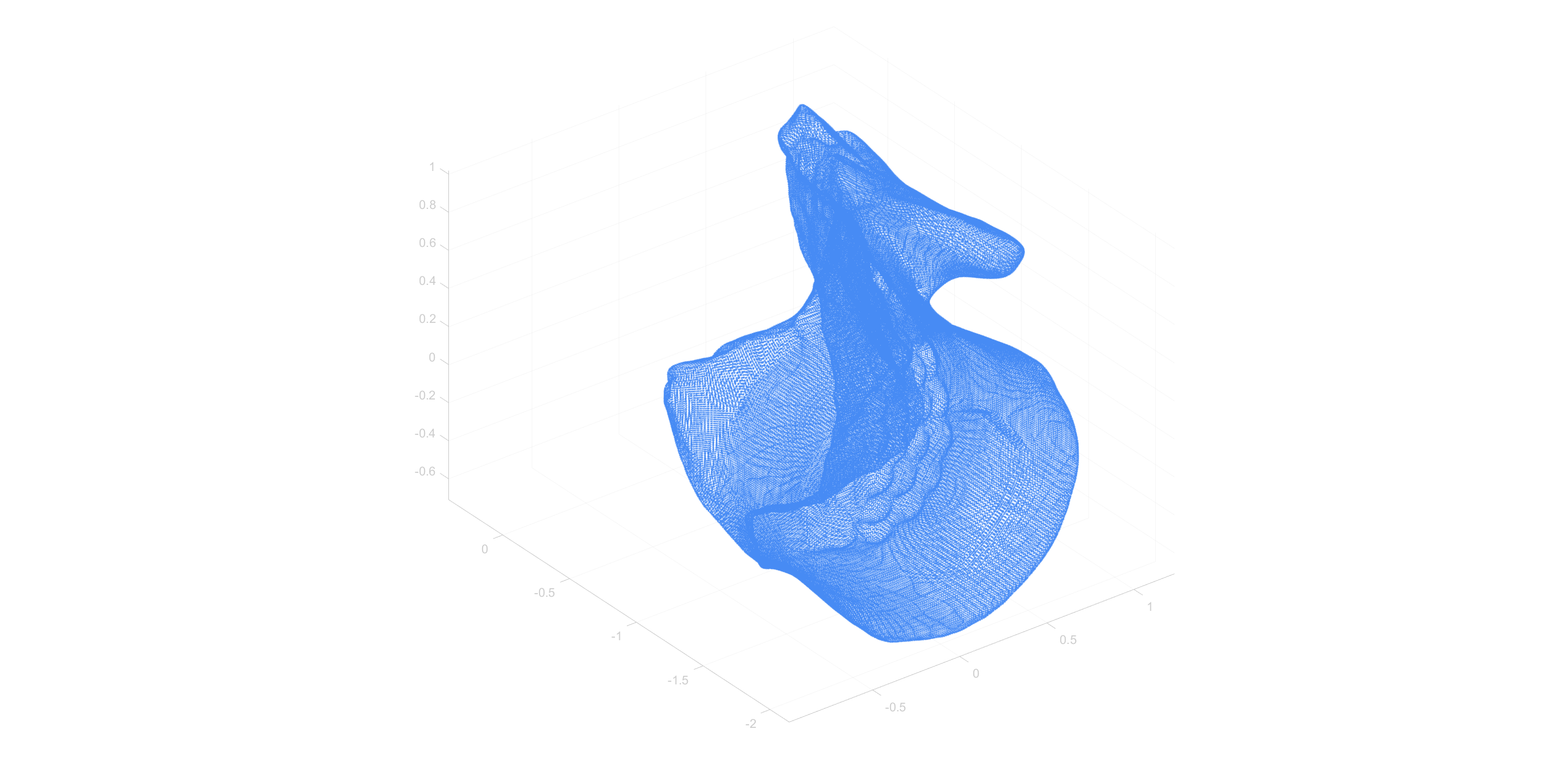
如果想指定其 RGB 颜色:
% 随机RGB颜色
color = rand([1 3]);
pcshow(ptCloud.Location,color);
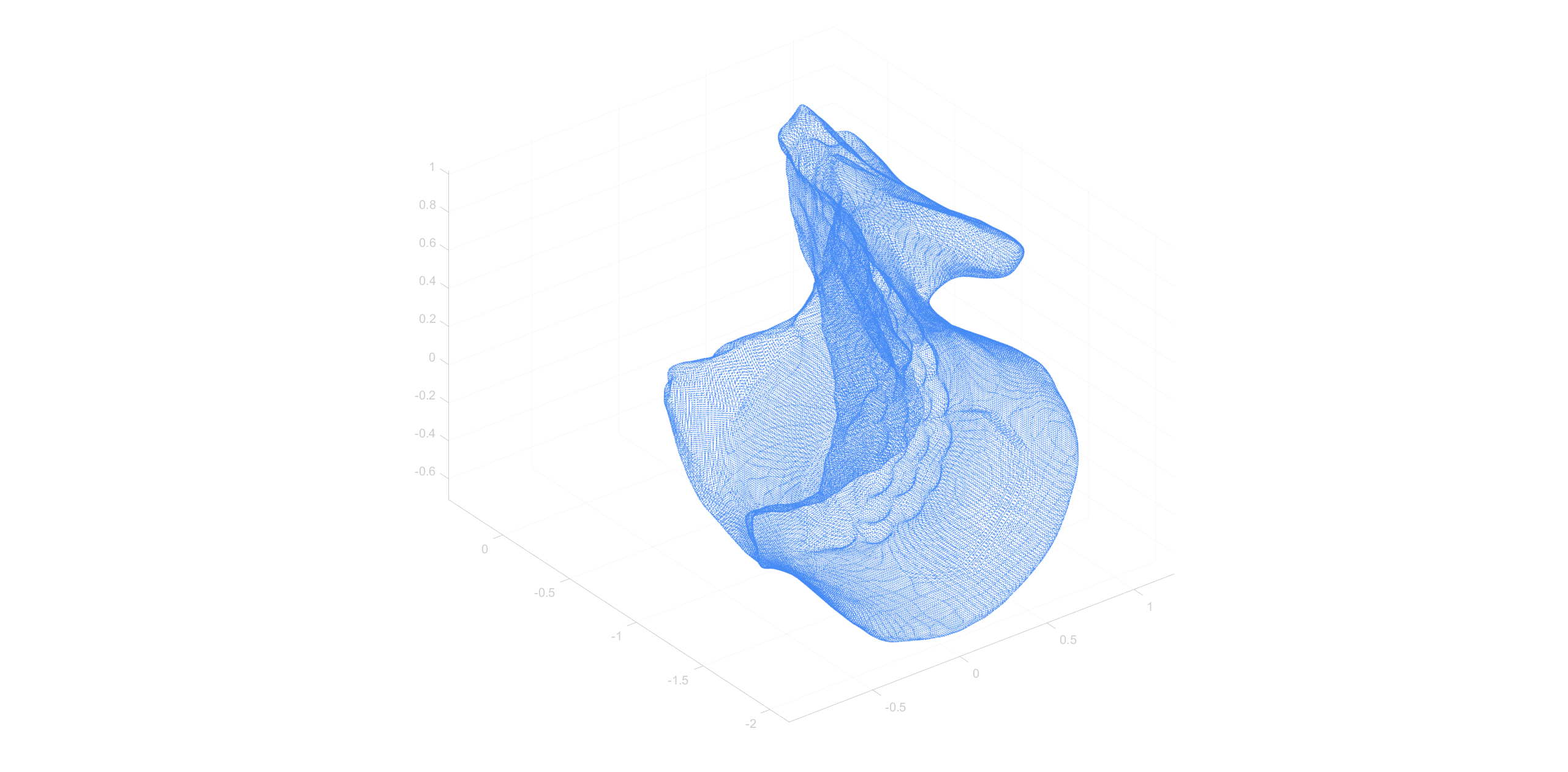
如果想修改点的尺寸:
% 修改点的尺寸
pcshow(ptCloud.Location,r,'Markersize',0.1)
其中 ptCloud.Location,得到的是 ptCloud 中所有点的 \text x \text y \text z 坐标,是一个 \text n \times \text 3 的矩阵。
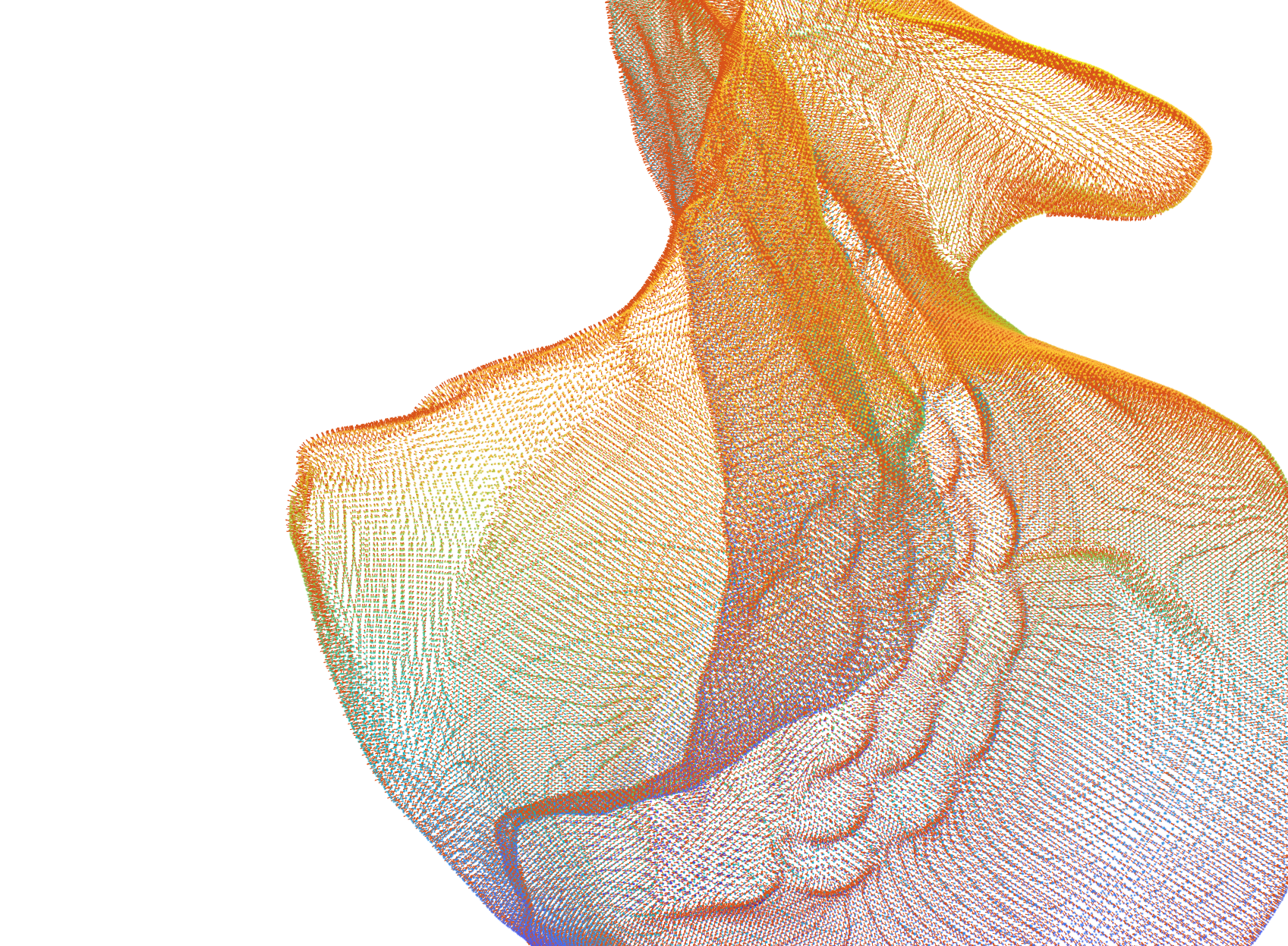
计算法向量
% 读取pcd
ptCloud = pcread('head1.pcd'); %读取点云
% 求法向量
normals = pcnormals(ptCloud);
% 点云x y z坐标
x = ptCloud.Location(:,1);
y = ptCloud.Location(:,2);
z = ptCloud.Location(:,3);
% 法向量 x y z坐标
u = normals(:,1);
v = normals(:,2);
w = normals(:,3);
% -------------------法向量可视化-------------------------
quiver3(x,y,z,u,v,w);
 |
 |
|---|
计算曲率
点云的曲率一般指 1. 主曲率,2.平均曲率,3.高斯曲率
根据 B. He 等人提出的计算方法[1],高斯曲率 \text K 和平均曲率 \text H 可以按照下列公式计算:
之后,主曲率 \text C_{\text min} 以及 \text C_{\text max} 便可以求出:
其中,\text r_{\text x \text x} 等变量代表点云表面的偏导
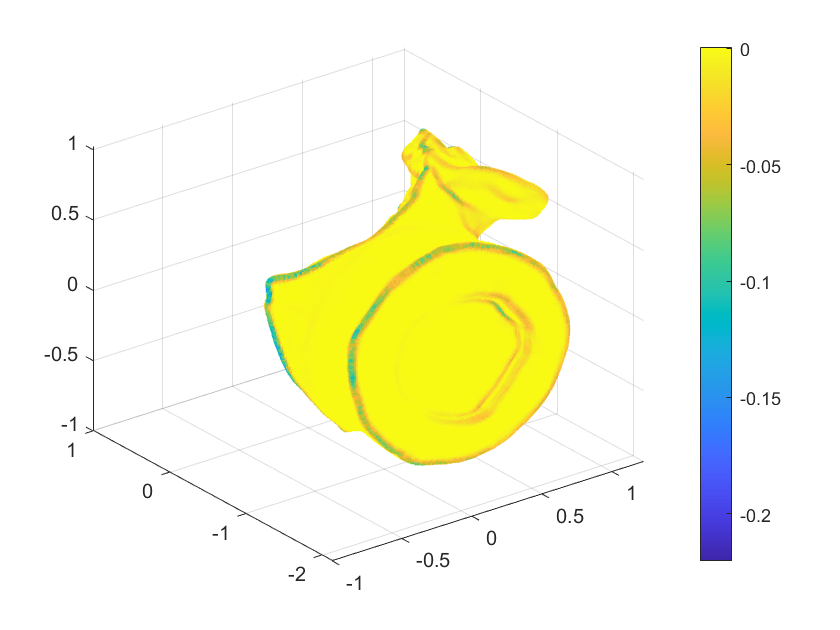
计算平面度
这个计算方法在 1997 年由 Westin 提出[4],起初用来拟合平面。公式为:
此处的 \lambda 为点云中的某个点,及其邻域构成的 \text n \times \text 3 矩阵的特征值
P = [x y z];
planarity = zeros(length(x),1);
K = 50;
for i = 1 : length(x) % 遍历点云中的每个点
point = P(i,:);
[indices,dists] = findNearestNeighbors(ptCloud,point,K,'sort',true); %knn搜索
% 1. 获取近邻点坐标
nnpoint=P(indices,:);
% 2. 计算区域的质心
centroid = mean(nnpoint,1);
% 3. 去质心
deMean = bsxfun(@minus,nnpoint,centroid);
% 4. 协方差矩阵
H = 1/length(indices)*(deMean'*deMean);
% 5. 奇异值分解计算特征值
s = svd(H);
% 6. 计算平面度
planarity(i) = 2*(s(2)-s(3))/3*sum(s);
end
% -------------------按平面度大小进行颜色渲染-------------------------
scatter3(x,y,z,3,planarity,);
参考文章
[1] B. He, Z. Lin, and Y. Li, "An automatic registration algorithm for the scattered point clouds based on the curvature feature," Optics & Laser Technology, vol. 46, pp. 53–60, 03/01 2013, doi: 10.1016/j.optlastec.2012.04.027.
[2] Tu Wien "3D models are courtesy by Vienna University of Technology." https://www.geometrie.tuwien.ac.at/ig/3dpuzzles.html (accessed Sep.12, 2022).
[3] 点云侠, "matlab 计算点云的面状指数" https://blog.csdn.net/qq_36686437/article/details/124325407(accessed Sep.15, 2022).
[4] C.-F. Westin, "Geometrical diffusion measures for MRI from tensor basis analysis," Proc. ISMRM'97, 1997.
评论