
OpenCV[27]

多传感器融合——后融合
多传感器融合的方案可以分成前融合(Early Fusion)方案和后融合(Late Fusion)方案。 前融合也叫特征级融合,不同传感器的数据会在特征级别进行合并,也就是说,不同模态的数据经过处理和合并后会得到一个特征集合。一般来说,每个模态数据的特征会被分别提取,然后被提取到的特征会被合并为一个

单目相机的相对速度估计
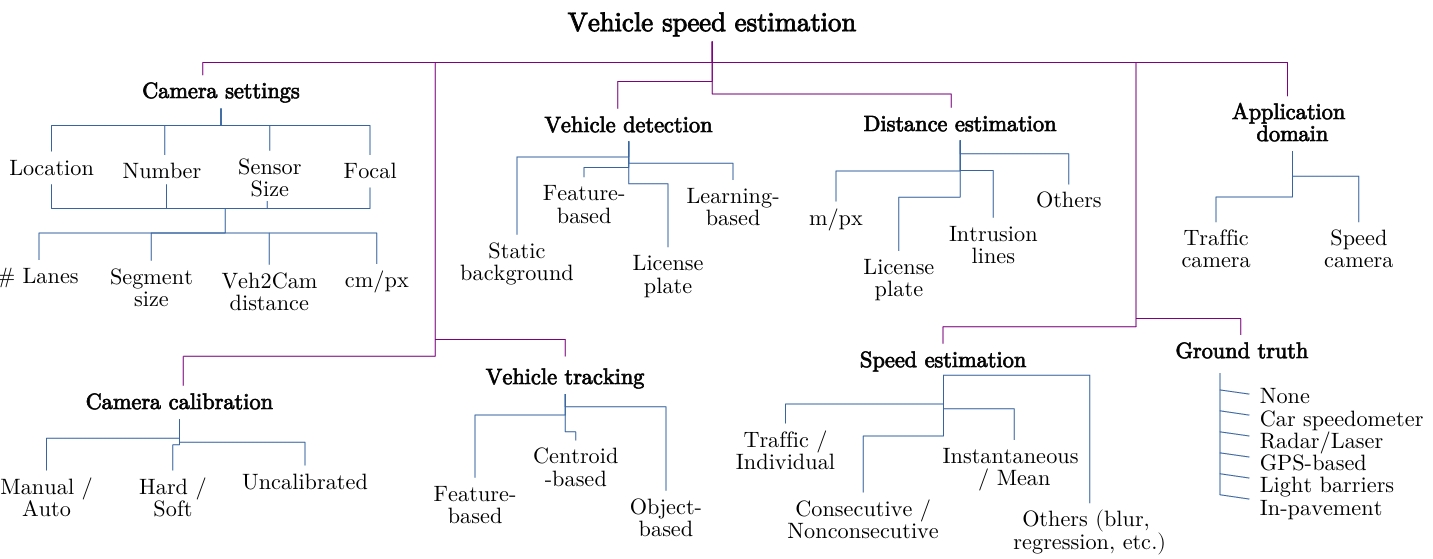
前言 单目相机的目标距离估计本身就已经充满了挑战,那么目标的(相对)速度估计也必然是十分困难... 目前单目相机的相对速度估计算法可以分成两类:传统方法和深度学习方法。没错,什么任务都可以深度学习。 传统方法中,最经典的是Mobileye在2003年的一篇论文中提出的算法。这个算法包含目标距离和速度
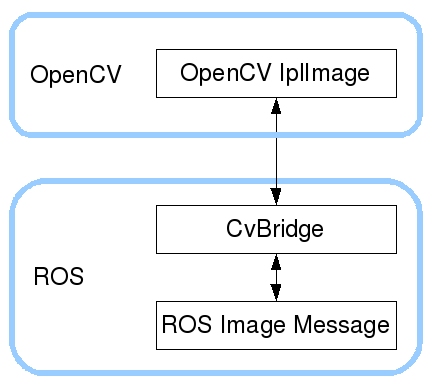
ROS不使用自带OpenCV以及替换cv_bridge
系统:Ubuntu20.04 平台:Jetson Orin NX ROS:ROS2 Foxy OpenCV:4.5.4 with CUDA 问题源自编译时警告: /usr/bin/ld: warning: libopencv_imgcodecs.so.4.2, needed by /opt/ros/
ROS2的消息发布和订阅&图像发布和订阅
ROS2的编译 colcon 是 ROS2 编译的工具。ROS2 的工作空间与 ROS1 保持一样的目录结构: <workspace>
├── build # 编译时自动生成,包含编译的中间文件
├── install # 编译时自动生成,包含编译的结果:可执行文件,库文件,

道路目标流量统计算法
实现流量统计算法有两个前提: 能够实现目标检测,最基本的前提,必须能够识别到视频帧中的车辆和行人。 能够进行目标跟踪,在检测的基础上,为目标分配一个唯一的ID。流量计数依赖于目标的唯一ID。 目标检测算法以YOLO系列为例。 跟踪算法以ByteTrack跟踪结果为例。将检测结果objects作为By

相机视频流的编码格式
VideoWriter 类 最近几个项目都需要保存相机图像数据,也就是存成视频。有的要求保存源视频,有的要求保存处理后的视频。 由于图像数据的读取是使用 OpenCV,目标检测框架也是建立在OpenCV的基础上,所以保存图像顺理成章也使用OpenCV。使用 OpenCV 的 VideoWriter

PCIe-GL26设备将GMSL相机图像发送至HOST端
PCIe-GL26 先看看 PCIe-GL26 是个什么设备 本质上是个自带 Jetson Xavier 系统,且带有6路GMSL2接口的图像采集卡。 GMSL2:Gigabit Multimedia Serial Link 2,注意这个和 GIGABYTE 技嘉科技 没啥关系……GMSL翻译一下就

单目相机像素坐标系到世界坐标系的转换
世界坐标系->像素坐标系 转换过程可参见这篇文章:FunnyWii's Zone 机器视觉 - 单目相机入门 ,其中描述了世界坐标系->像素坐标系的转换过程。可以归结为下述公式: 世界坐标系->像素坐标系的过程描述的是单目相机的成像原理。我们在使用单目相机的过程中,更关心的往往是像素坐标系->世界坐
OpenCV 的 remap() 函数中的 map1 和 map2
今天在 StackOverflow 上看到这么个问题:想把原图像中的一个点 g,通过内参和畸变参数映射到去畸变图像中的点 p,并获取这个点的坐标。 你以为我接下来会说:“xxx和我想的一样,但是我想错了,其实并不是这样....” 现在,我想说的只有“其实并不是这样”,因为我连map1和map2是啥我