

C++ STL 容器是使用频率超高的基础设施,只有了解各个容器的底层原理,才能得心应手地用好不同的容器,做到用最合适的容器干最合适的事情[1]。看了文章[1],可惜其中对容器方法的底层几乎没有提及,那就自己边查边写吧。本文大部分内容来自cplusplus.com/reference/ 。
C++ STL(Standard Template Library)中的容器主要有array, vector, deque, list, forward_list, queue, priority_queue, stack, map, multimap, set, multi_set, unordered_map, unordered_multimap, unordered_set, unordered_multiset 这16种。
Array
容器属性:顺序容器(支持随机访问)
内存空间:连续内存空间
容器尺寸:固定大小
头文件:#include <array>
类模板头:template < class T, size_t N > class array;
声明方式: std::array<int,110> arr { };
如果array未初始化,会随机分配值。
数组大小固定,不支持添加或删除元素等改变大小的操作,所有的元素严格按照内存地址线性排列。
此外C++中的数组要于C风格数组,也就是使用[]操作符声明的数组区分开。C++的数组支持begin(), end(), front(), back(), at(), empty(), data(), fill(), swap() 等标准接口 ,但是C风格数组不支持这些方法。
front():返回数组第一个元素的引用。如果数组为空,调用front()是未定义行为;否则直接通过索引访问第一个元素。时间复杂度O(1)。back():返回数组最后一个元素的引用,通过索引直接访问最后一个元素,其他同上。at(i):返回数组中i位置元素的引用。如果超出数组尺寸,会抛出out_of_range异常。时间复杂度O(1)。empty():返回bool类型结果,判断数组是否为空。时间复杂度O(1)。data():返回数组第一个元素的指针,即数组的地址。时间复杂度O(1)。fill(a):将数组所有内容填充为指定内容a。底层使用一个循环,遍历每个元素,然后将当前元素赋值为a。时间复杂度O(n),n为元素数量。swap(arr):将两个数组的元素进行交换,要求两数组类型和尺寸都必须相同,否则编译不通过。和其他容器不同的是,数组的swap()方法交换了各个元素的值,但是容器中所存的元素的地址没有交换。底层使用一个循环遍历数组元素,然后swap()函数交换当前数组和另一个数组中对应位置的元素。要注意swap()之后迭代器,引用和指针都仍然有效。先说迭代器,由于内存地址没有变化,只是交换了元素内容,因此迭代器仍然指向相同的内存地址;引用一旦绑定就不会改变,即使交换了元素,引用仍然指向最初绑定元素的位置;指针和迭代器类似,仍然指向原来的地址。时间复杂度O(n)。举例:
std::array<int, 3> a = {1, 2, 3};
std::array<int, 3> b = {4, 5, 6};
int& ref_a = a[0]; // 绑定到 a 的第一个元素
int* ptr_b = &b[1]; // 指向 b 的第二个元素
// 交换 a 和 b 的元素
a.swap(b);
// 现在 ref_a 仍然绑定到 a[0],但 a[0] 的值已经变成了 4
// ptr_b 仍然指向 b[1],但 b[1] 的值已经变成了 2vector
容器属性:顺序容器(支持随机访问)
内存空间:连续内存空间,使用内存分配器动态管理内存
容器尺寸:动态调整大小
头文件:#include <vector>
类模板头:template < class T, class Alloc = allocator<T> > class vector;
声明方式:std::vector<int> vec;
在底层上,vector 使用动态分配的 array,也就是说底层用array实现,当现有空间无法满足需求时,会重新分配(reallocate)一个更大的 array 并把所有元素移动过去。因此,vector 的 reallocate非常耗时。所以,每次 reallocate时会预留更多空间,也就是说,vector的capacity()通常会大于size()。当重新分配空间时,一般会预留出150%-200%的空间,一般200%空间,算法导论里证明这样均摊时间最少[4]。
operator[]:和数组一样,可以直接通过[]访问元素,时间复杂度O(1)。at(i):vector.at(i)等同于vector[i]。区别在于,vector[i]效率(可能)更高,但不会做越界访问保护和异常抛出,需要自己做越界检查。时间复杂度O(1)。front()和back():分别返回第一个和最后一个元素。如数组一样,空vector会导致未定义行为。时间复杂度O(1)。data():返回指向容器中第一个元素的指针。时间复杂度O(1)。push_back(i):在容器的尾部插入元素i,底层通过拷贝或者移动的方式,如果是拷贝,事后自行销毁先前创建的元素。调用push_back()时,若当前容量不够放入新元素,即capacity()==size(),vector会重新申请一块内存,把之前vector内存里的元素拷贝到新内存中,然后把push_back的元素拷贝到新的内存中,最后要析构原有的vector并释放原有内存。触发reallocate每次复制的时间复杂度O(n),注意此时迭代器会失效,因为分配了新的内存,不触发时为O(1) ,均摊下来时间复杂度O(1)。根据代码[5]:#include <iostream> #include <vector> int main() { std::vector<int> v; int last = 0; for (int i = 1; i <= 1e5; i++) { v.push_back(1); if (last != (int)v.capacity()) { std::cout << v.capacity() << " "; last = v.capacity(); } } }运行时输出
1 2 4 8 16 32 64 128 256 512 1024 2048 4096 8192 16384 32768 65536 131072,都是2的次幂,因此每次push_back的花销为:c_i= \left\{ \begin{aligned} i && i-1为2的幂 \\ 1 && 其他情况 \\ \end{aligned} \right.
那么有:
也就是说,有n次插入操作,总时间复杂度为O(3n), 单次均摊时间复杂度为O(3) 。
在算法导论中,\lg一般以2为底,因为以2,10或e为底,最终结果只差一个常数,没有区别。关于求和那里为什么得出2n,可以参考几何级数(等比数列)的求和:
关于扩容次数的解释[6],这里的倍增因子为m(此处为2),也就是容量到达上限后,新空间容量增长m 倍,假设扩容k 次,那么有1+m+m^2+...+m^k \geq n,根据上面的公式,化简为:
在这里扩容次数\log_m n就变成了\lg_2 n即\lg n。
pop_back():删除最后一个元素。pop_back之后end迭代器以及其他对已删除元素的引用和指针都会失效,但是要注意删除元素时capacity()并不会减少。时间复杂度O(1)。insert():插入元素。可以在指定位置插入一个或者多个,也可以在指定区间插入元素。底层是把当前要插入元素位置后面的元素向后移动,然后把待插入元素插入到相应的位置,需要调用类的构造函数和移动构造函数,时间复杂度O(n)。
emplace():插入元素,但是emplace()每次只能插入一个元素,而不是多个。效率相比insert()更高,只需要调用构造函数,避免产生不必要的临时变量。时间复杂度O(n)。erase(): 通过迭代器删除某个或某个范围的元素,并返回下一个元素的迭代器。底层在不删除最后一个元素的情况下,把这个元素后面的所有元素向前移动一位,这是一个拷贝的动作,然后把容器结束位置向前移动一位,并返回指向当前位置的迭代器。时间复杂度O(n)。clear():清空容器,size()==0,但capacity()不变。时间复杂度O(n)。底层操作可以看STL源码,简单来说就是通过destroy函数,destroy函数内部进行遍历析构。// 清除全部元素。注意并未释放空间,以备可能未来还会新加入元素。 void clear() { erase(begin(), end()); } //调用vector::erase的两迭代器范围版本 iterator erase(iterator first, iterator last) { iterator i = copy(last, finish, first); //finish在vector中定义表示目前使用空间的尾,相当于end(),clear调用时last=finish destroy(i, finish); //全局函数,结构的基本函数 finish = finish - (last - first); return first; }swap():交换两个vector的内容,包括它们的start(指向第一个元素),finish(指向最后一个元素的下一个位置),和end_of_storage(指向已分配内存的末尾)。两个容器可以尺寸不一致。底层是直接交换两个vector的地址,时间复杂度O(1) 。assign():分配新的内容至vector中,以覆盖现有内容(清除以前的内容)并修改其size()。底层先检查存储空间是否足够,如果不够就reallocate,然后清除掉之前的内容,再将新的内容赋值到当前vector,时间复杂度O(n),取决于assign了多少个元素。emplace_back():在容器的尾部插入元素,和push_back不同。具体区别是push_back调用了一次构造函数,还调用了一次拷贝构造函数,但是emplace_back则是直接在容器尾部创建这个元素,少了一次对象的构造和析构。均摊时间复杂度O(1)。
Vector释放内存的方法
上面已经说过,clear() 不会导致vector容量的变化,内存空间也就不能通过这种方式释放。先看看什么情况下需要释放[6]
vector是局部变量的不用释放。采用智能指针创建的
vector不用释放。动态分配出来的
vector,但数据量不大,对内存影响很小不用释放,但未来重新使用这个vector,插入大量新元素,用swap清空比较好。动态分配出来的
vector且包含大数据集的需要。
可以用两种方法:
clear()+shrink_to_fit(),shrink_to_fit()是C++11增加的函数,作用是释放掉未使用的内存。swap():如vector<int>().swap(v)创建一个局部临时变量,仅在当前行有效。
deque
容器属性:顺序容器(支持随机访问)
内存空间:分段连续内存空间,使用内存分配器动态管理内存
容器尺寸:动态调整大小
头文件:#include <deque>
类模板头:template < class T, class Alloc = allocator<T> > class deque;
声明方式:std::deque<int> myDeque;
deque(double-ended queue),是一个可以在首尾两端进行动态增删的顺序容器。如果说 vector是连续的,deque则是分段连续。deque会维护不同 array之间的关联信息,用户无需关心分段这件事。deque在 reallocate时,只需新增/释放两端的 storage chunk 即可,无需移动已有数据(vector的弊端),尤其在数据规模很大时,效率提升明显。但 deque并不适合遍历,因为每次访问元素时,deque底层都要检查是否触达了内存片段的边界,会造成额外开销。deque的核心优势是在双端都支持高效(时间复杂度O(1))的增删操作,程序员选择使用 deque时必须有双端操作的需求。[1]。deque的迭代器并不是普通指针,其底层实现非常复杂。因此,除非必要(双端操作),尽可能选用vector。对deque进行排序操作,可将deque先完整复制到一个vector上,对vector排序后,再复制到deque[7]。
push_front():在队列最前面添加一个元素,通过拷贝或者移动的方式添加。时间复杂度O(1)。
push_back():在队列末尾添加一个元素。时间复杂度O(1)。emplace_front():在队列最前面添加一个元素。时间复杂度O(1)。emplace_back():在队列末尾添加一个元素。和vector类似,emplace_back也只调用了构造函数(就地构造),而没有移动构造函数和拷贝构造函数,因此效率更高。时间复杂度O(1)。resize():改变容器中可存储元素的个数,如果重新扩展的容量小于现在的容量,多出的将会丢失,如果大于现在的容量,将会在现有容量的基础上进行扩充,并以0填充默认值。时间复杂度O(n)。pop_front():删除队列的第一个元素。时间复杂度O(1)。pop_back():删除队列末尾的元素。时间复杂度O(1)。insert():指定位置插入一个或多个元素。先检查容量,如果没有就先扩容,然后将插入点之后的所有元素向后移动,最后插入新元素。最好情况下时间复杂度O(1),比如在尾部插入;最坏情况下比如在头部插入,时间复杂度O(n)。
queue
容器属性:顺序容器(支持随机访问)
内存空间:分段连续内存空间,使用内存分配器动态管理内存
容器尺寸:动态调整大小
头文件:#include <queue>
类模板头:template <class T, class Container = deque<T> > class queue;
声明方式:std::queue<int> myQueue;
FIFO设计,只能从一端插入,从另一端删除。
priority_queue
这个队列叫做优先级队列。它的特点是严格弱序,即 priority_queue 保证容器中的第一个元素始终是所有元素中最大的。默认情况下,priority_queue 使用 vector 作为底层容器。
list
容器属性:顺序容器(支持顺序访问,不支持随机访问)
内存空间:离散内存,使用内存分配器动态管理内存
容器尺寸:能够添加元素。
头文件:#include <list>
类模板头:template < class T, class Alloc = allocator<T> > class list;
声明方式: std::list<int> mylist;
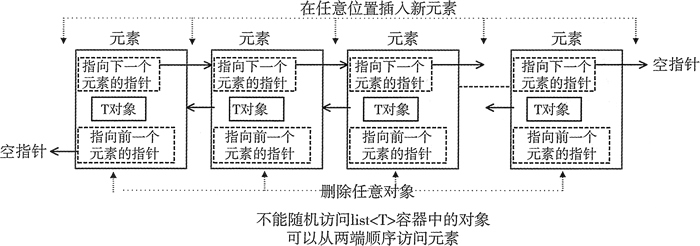
由于list的底层是双链表,其支持在任意位置快速插入和删除元素,且支持双向遍历。双链表把各个元素保存在彼此不相干的内存地址,但是每个元素都会与前后相关联。如果想要访问某个元素,必须从一个已知元素朝一个方向(前后都行)遍历,直到需要的元素。因为需要保存元素间的关联信息,list需要更多内存空间。
下图展示了list双向链表是如何存储元素的。list通过指针来描述元素间的前后关系,每个元素都包含两个指针,注意第一个元素的前向指针和最后一个元素的后向指针都是null,因为没有元素。
特别的是,list有两种迭代器, begin()和end(),以及rbegin()和rend() 。begin 指向第一个元素,end 指向最后一个元素的下一个位置,即null。rbegin 指向最后一个元素,rend 指向第一个元素。这两种迭代器不能混用。
既然list不支持随机访问,也就不提供下标操作符和at()函数。
push_back(const T& val):在容器尾部插入一个元素。底层上首先分配内存存储新元素,随后在list最后插入(若list为空则为第一个元素),更新链表最后的next指针,使之指向新元素。最后更新链表大小。时间复杂度O(1)。push_front(const T& val):在容器头部插入一个元素。底层和push_back差不多,只是需要更新链表的最前向的指针,指向新元素。时间复杂度O(1)。emplace_back():在容器尾部直接生成一个元素。和push_back()的功能相同,但效率更高。时间复杂度O(1)。insert():在指定迭代器的位置插入元素。在底层上,首先获取迭代器it指向的当前元素及其前一个元素。然后创建一个新元素。随后将前一个元素的next指向新元素,将新元素的prev指向前一个元素,至此新元素和前面元素的链接完成。然后将新元素的next指向当前元素,并将当前元素的prev指向新元素。至此新元素和当前元素的链接完成。时间复杂度O(n)。pop_front():删除容器最前面的元素。底层上先检查容器是否为空。然后将第二个节点(如有)的prev设为null,将list头部指针删除。时间复杂度O(1)。pop_back():删除容器尾部的元素。时间复杂度O(1)。erase():删除指定位置或位置区间元素。底层上遍历链表,如果找到了要删除的元素,更新要删除的元素前面元素的next和后面元素的prev,然后删除当前元素。时间复杂度O(n)。resize():如果小于当前size,容器会删除超出的元素;如果大于当前size,容器会在末尾插入指定元素,如不指定,执行默认初始化。一般认为时间复杂度O(n)。swap():交换两个类型相同的list的元素。底层上直接交换头部节点和尾部节点的指针。时间复杂度O(1)。reverse():反转list。通过迭代的交换所有元素的prev和next实现。时间复杂度O(1)。assign():将新内容分配给容器,替换掉当前内容。底层通过先清除掉现有内容,然后把新内容插入。时间复杂度O(n)。
forward_list
容器属性:顺序容器(支持顺序访问,不支持随机访问)
内存空间:离散内存,使用内存分配器动态管理内存
容器尺寸:能够添加元素。
头文件:#include <forward_list>
类模板头:template < class T, class Alloc = allocator<T> > class list;
声明方式: std::forward_list<int> values;
和list容器的区别在于,forward_list 是单链表。下图描述了单链表和双链表的区别。这两个容器的特性相近,擅长在任何位置插入或删除元素,但是访问元素的效率比较低。由于forward_list 只能从前向后遍历,不支持反向遍历,因此只有前向迭代器,没有rbegin()和rend() 之类的成员函数。相比list ,forward_list 使用单链表使用内存空间更少,空间利用率更高。
map
容器属性:关联容器,元素类型<key, value> ,其中key唯一,元素有序存储
内存空间:使用内存分配器动态管理内存
容器尺寸:能够添加元素
头文件:#include <map>
类模板头:typedef pair<const Key, T> value_type;
声明方式:std::map<char,int> mymap;
map底层是红黑树,具有高效的查找、插入和删除操作。元素类型是由 key 和 value 组成的 std::pair,实际上 map 中元素的数据类型就是 typedef pair<const Key, T> value_type;
at(const Key& k):如果map中存在键k,则返回与键k关联的值的引用。时间复杂度O(\log{n})。比起operator[],在找不到键时,会创建一个新的键值对,其中键是k,值是值类型的默认构造值,然后返回这个新插入值的引用。因此,operator[]不会抛出异常,但可能会导致意外的键值对插入。emplace():插入一个键值对,这个键值对是就地构造的,避免了创建临时对象。如果插入的key已经存在,那么不会进行任何操作并返回false。时间复杂度O(\log{n})。erase():通过迭代器或者键来删除指定键值对。删除指定迭代器的键值对,时间复杂度O(1)。删除指定键的键值对,时间复杂度O(\log{n})。删除指定范围的键值对,时间复杂度O(n)。insert():若待插入元素的键值key在map中不存在,则insert插入成功,并返回插入后元素的迭代器和true。若待插入元素的键值key在map当中已经存在,则插入失败,并返回map中键值为key的元素的迭代器和false。时间复杂度O(\log n)。[] operator:底层是用insert实现的。时间复杂度O(\log n)。find():在容器中寻找值为k的元素,返回该元素的迭代器。否则,返回map.end()。时间复杂度O(\log n)。
multimap
容器属性:关联容器,元素类型<key, value> ,允许不同元素key相同
内存空间:使用内存分配器动态管理内存
容器尺寸:能够添加元素
头文件:#include <map>
multimap与 map底层原理完全一样,都是红黑树,区别在于multimap 允许同一个key拥有多个value。向 multimap中新增元素时,multimap 只会判断 key 是否相同,不会判断 value 是否相同。也就是说,多次插入相同的 <key, value> ,multimap 会全部保存下来。
set
容器属性:关联容器,有序,元素自身即key,元素有唯一性
内存空间:使用内存分配器动态管理内存
容器尺寸:能够添加元素
头文件:#include <set>
和map一样,底层是红黑树,set 中的元素必须是唯一的,且已经排序好(升序,从小到大),不允许出现重复的元素,且元素不可更改,但可以自由插入或者删除。
set提供了特殊的搜寻函数。
count (elem):返回元素值为elem的个数,时间复杂度O(\log n)。find(elem):返回元素值为elem的第一个元素,如果没有返回end(),时间复杂度O(\log n)。lower_bound(elem):返回元素值为elem的第一个可安插位置,也就是元素值 >= elem的第一个元素位置,时间复杂度O(\log n)。upper_bound (elem):返回元素值为elem的最后一个可安插位置,也就是元素值 > elem 的第一个元素位置,时间复杂度O(\log n)。equal_range (elem):返回elem可安插的第一个位置和最后一个位置,也就是元素值==elem的区间,时间复杂度O(\log n)。insert(elem):插入一个elem副本,返回新元素位置,无论插入成功与否erase(elem):删除与elem相等的所有元素,返回被移除的元素个数
multiset
和set的区别在于,允许元素是重复的。
stack
LIFO容器,后进先出,只能从一端插入和删除,不允许遍历。默认情况下,stack使用 deque作为底层容器。
unordered_map
容器属性:关联容器,元素类型<key, value> ,其中key唯一,元素无序存储
内存空间:使用内存分配器动态管理内存
容器尺寸:能够添加元素
头文件:#include <unordered_map>
声明方式:std::unordered_map<char,int> mymap;
所有unordered的容器,都是以哈希表为底层。通常 map 增删元素的效率更高,unordered_map 访问元素的效率更高。通过直接计算 key 的哈希值来访问元素,时间复杂度O(1)。
参考文章
[1] C++ STL 十六大容器 —— 底层原理与特性分析 - 知乎
[2] 详解C++STL容器系列(一)—— vector的详细用法和底层原理_c++ vector底层-CSDN博客
[4] vector push_back 时间复杂度分析_vector中push的时间复杂度为o(n)-CSDN博客
[5] vector push_back函数时间复杂度的证明 - YouXam - 博客园
[6] C++ vector内存分配及正确释放_vector 释放-CSDN博客
[7] [C++系列] 58. deque底层实现原理剖析_c++ deque的底层实现-CSDN博客
评论