
为什么不更了呢,因为发现自己使用的操作系统、系统架构一直都在变,软件版本和下载链接也一直在更新。所以这篇更适合作为当时的安装记录,而不是长期有效的安装指南。
软件安装
Clash
代理工具配置。需要注意,原 Clash 项目已经归档,相关 release 链接可能失效。这里保留当时的安装记录。
首先下载软件:
https://github.com/Dreamacro/clash/releases
我当时下载的是 clash-linux-amd64-v1.14.0.gz:
https://github.com/Dreamacro/clash/releases/download/v1.14.0/clash-linux-amd64-v1.14.0.gz
之后在 /home 下面创建一个 clash 文件夹,并将下载的文件解压到这里,改名为 clash。
在新文件夹内打开 terminal,修改软件权限:
chmod +x clash
下载配置链接和 Country.mmdb 文件:
wget -O config.yaml "clash 的订阅链接"
wget -O Country.mmdb https://www.sub-speeder.com/client-download/Country.mmdb
不过非常遗憾的是,个人比较苦逼,这两个东西都下载不下来,所以就用另一台电脑里现成的。这两个命令会在 clash 文件夹中生成 config.yaml 和 Country.mmdb 两个文件。
之后,修改系统代理:
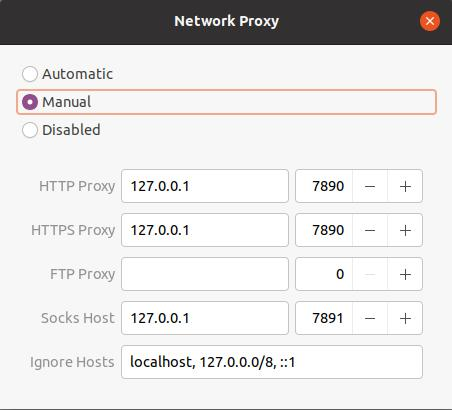
仍然是在这个文件夹中的 terminal,运行下面命令即可启动 Clash。不要忘了最后那个 .:
./clash -d .
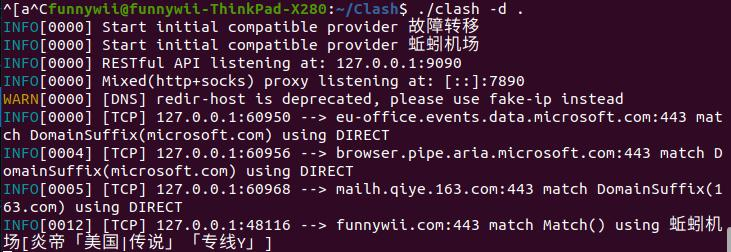
在 http://clash.razord.top/#/proxies 这个 dashboard 中可以修改节点。
VS Code
下载地址:Visual Studio Code
Ubuntu Software 里也有 VS Code。我当时遇到的问题是,商店版不能输入中文。这个问题可能随版本变化而变化,但考虑到有些代码不得不用中文注释,所以我更建议下载官网 .deb 版本,或者使用微软官方 apt 源安装。
在官网中,Ubuntu 系统选择 .deb 版本。
cd 至安装包下载路径,运行命令:
sudo dpkg -i code_1.77.3-1681292746_amd64.deb
注意,每个版本的文件名都可能不一样。
安装完成后,就可以打开 VS Code。
MATLAB
我用的是教育版:下载 MATLAB、Simulink、Stateflow 和其他 MathWorks 产品
下载得到的是一个压缩文件,解压后,在解压目录运行:
./install
一直 next,并安装自己需要的 package,直到结束即可。
WPS
OneDrive
使用的是 onedriver:
sudo add-apt-repository ppa:jstaf/onedriver
sudo apt update
sudo apt install onedriver
安装后,在菜单中搜索 OneDriver,然后从这里启动它。

点击下图中的 + 号,选择一个文件夹或创建一个新的文件夹,OneDrive 会挂载在那里。
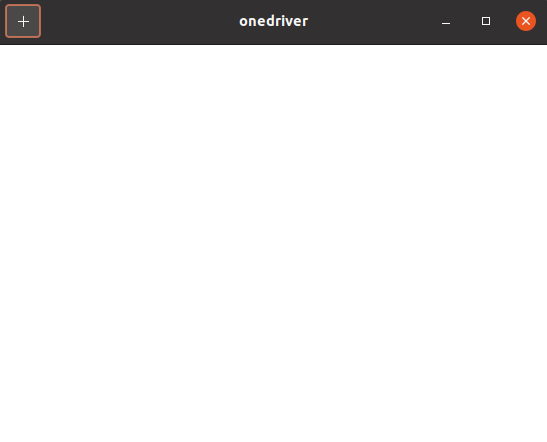
在之后弹出的微软登录页面中登录,便会挂载成功。挂载成功后,在上图页面会有一个对号,点击它,每次启动系统会自动挂载 OneDrive。
本来打算用 wine,但是想到经历过的很多糟心事,遂换星火:
注意,Ubuntu 20.04 版本需要先安装依赖。解压依赖包后,在依赖文件夹运行:
sudo apt install ./*.deb -y
之后再输入下面命令。官方建议不要使用 dpkg -i 命令,因为 apt install ./xxx.deb 可以自动处理依赖,直接 dpkg -i 可能导致安装失败。
sudo apt install ./spark-store_4.2.5_amd64.deb
安装完成后,运行:
sudo apt update
之后即可下载微信。体验了一下,仍然不能 Esc 退出,或者保存 wx 在后台。所以说不准哪天就换回 wine 了。归根结底,不推荐在 Linux 下面用微信。
笔记软件 Joplin
我用的是 Joplin,支持 Markdown 和多平台同步。
万恶的 DingTalk
官网下载:钉钉官网下载页面
Linux 版的安装页面似乎在搜索引擎直接搜不出来。
向日葵远控
官网下载:向日葵远程控制 app 官方下载
FinalShell
一个免费的 Shell 软件,而且 Windows 和 Linux 都有。
一键安装脚本:
rm -f finalshell_install_linux.sh
wget www.hostbuf.com/downloads/finalshell_install_linux.sh
chmod +x finalshell_install_linux.sh
./finalshell_install_linux.sh
Microsoft To Do
Install Microsoft To-Do unofficial on Ubuntu using the Snap Store
sudo snap install microsoft-todo-unofficial
Google 输入法
Rime 输入法也不错,但是配置起来比较麻烦。
先安装 fcitx:
sudo apt install fcitx
之后,使用 im-config 来配置,将系统默认的 ibus 改为 fcitx,并重启。
sudo apt install fcitx-googlepinyin
需要注意,第一个原本的输入法需要保留,否则用 Shift 切换英文会出现问题。
Anaconda
直接官网下载:Download Anaconda Distribution
下载完成后,给安装文件添加执行权限,并运行安装文件:
chmod +x ./Anaconda3-xxx-Linux-x86_64.sh
./Anaconda3-xxx-Linux-x86_64.sh
安装完成后,可以执行:
conda init
然后重开 terminal,使用:
conda activate <env>
如果没有使用 conda init,也可以手动在 ~/.bashrc 文件最后一行加入 Anaconda 路径,例如:
export PATH=/home/funnywii/anaconda3/bin:$PATH
之后执行:
source ~/.bashrc
需要注意,旧写法 source activate <env> 在一些环境里仍可用,但新版 conda 更推荐 conda activate <env>。
环境配置
C++
安装 GNU 编译器和 GDB 调试器:
sudo apt-get install build-essential gdb
Python
Ubuntu 20.04 自带 Python 3.8。
OpenCV
FunnyWii's Zone - OpenCV 入门笔记:OpenCV 4.7.0 安装配置并加入 CUDA 支持(Ubuntu 20.04 LTS)
PCL
FunnyWii's Zone - PCL 入门笔记:PCL 1.13.0 的安装和配置(Ubuntu 20.04 LTS)
ROS Noetic
详细介绍如何在 Ubuntu 20.04 中安装 ROS 系统
已经介绍得很详细,基本所有可能遇到的问题都提及到了。
PS:我每次安装的时候都会遇到上述文章中提到的问题,我都怀疑是不是这种安装方式必然会遇到这些问题。
ROS2 Foxy
原文这里写的是 ROS2 Foxy,但步骤中混用了 Dashing 的二进制包、ros2_dashing 目录和 Dashing 文档。这种做法容易造成混乱,不推荐。
如果目标环境是 Ubuntu 20.04 + ROS2 Foxy,更推荐优先使用 Foxy 官方 apt 安装方式。一般步骤是先添加 ROS2 仓库:
sudo apt update && sudo apt install curl gnupg2 lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
然后安装 Foxy 桌面版:
sudo apt update
sudo apt install ros-foxy-desktop
安装并初始化 rosdep:
sudo apt update
sudo apt install -y python3-rosdep
sudo rosdep init
rosdep update
设置环境变量:
source /opt/ros/foxy/setup.bash
也可以把它写入 ~/.bashrc:
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
source ~/.bashrc
之后便可在两个 terminal 中分别运行 C++ 和 Python 的 talker 和 listener:
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
至于 rti-connext-dds-5.3.1,它更偏向可选 DDS 实现相关依赖,并不是 ROS2 Foxy 的必装项。普通使用场景下,默认 DDS 实现通常已经足够。
spdlog
sudo apt-get install libspdlog-dev
mqtt
引入 mosquitto 仓库:
sudo apt-add-repository ppa:mosquitto-dev/mosquitto-ppa
sudo apt-get update
安装 mosquitto:
sudo apt-get install mosquitto
安装 dev 开发包:
sudo apt-get install mosquitto-dev
安装客户端:
sudo apt-get install mosquitto-clients
查看 mosquitto 服务器是否开启:
sudo service mosquitto status
参考文章
[1] Linux 下安装 OneDrive 客户端 onedriver
[2] ROS2 Dashing Ubuntu Binary Install
[5] Ubuntu 常用软件安装
评论