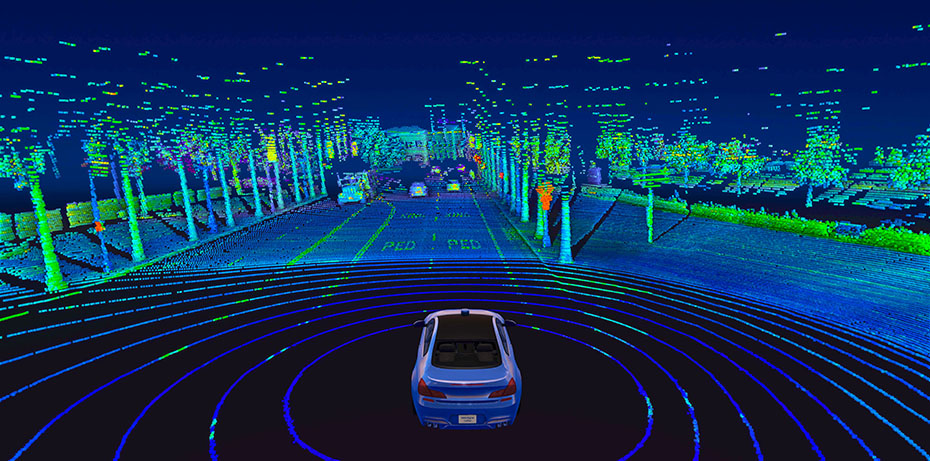
激光雷达 Lidar (Light Detection and Ranging ) ,扫描激光束时照射对象物体,通过测量照射到物体弹回的时间来测定离物体的距离和位置,或确定对象物性质的光传感器技术。
原理
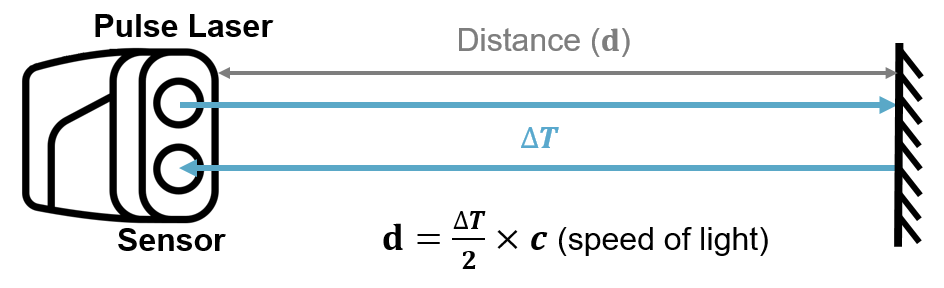
TOF
测距原理大多是飞行时间 TOF(Time of Flight),利用发射器发射的脉冲信号和接收器接受到的反射脉冲信号的时间间隔来计算和目标物体的距离。
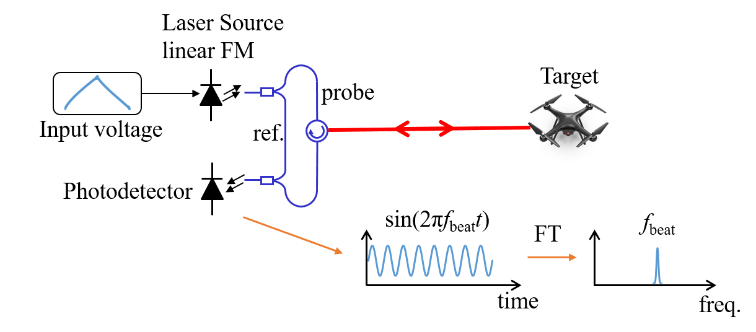
FMCW
相干探测方法即为调频连续波方法 (Frequency-Modulated Continuous-Wave,FMCW),通过测量发射电磁波与返回电磁波的频率变化解调出被测目标的距离及速度。
分类
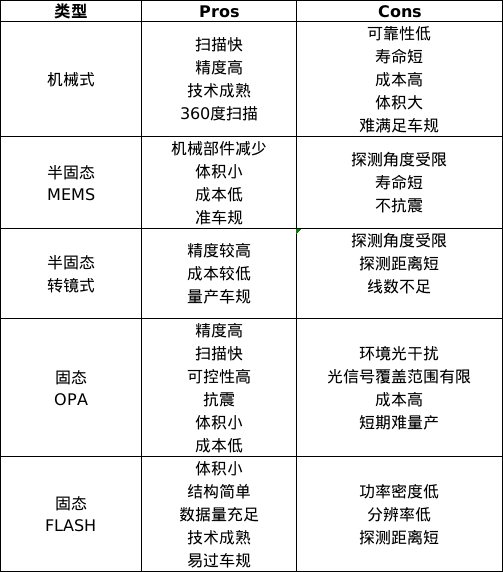
机械式
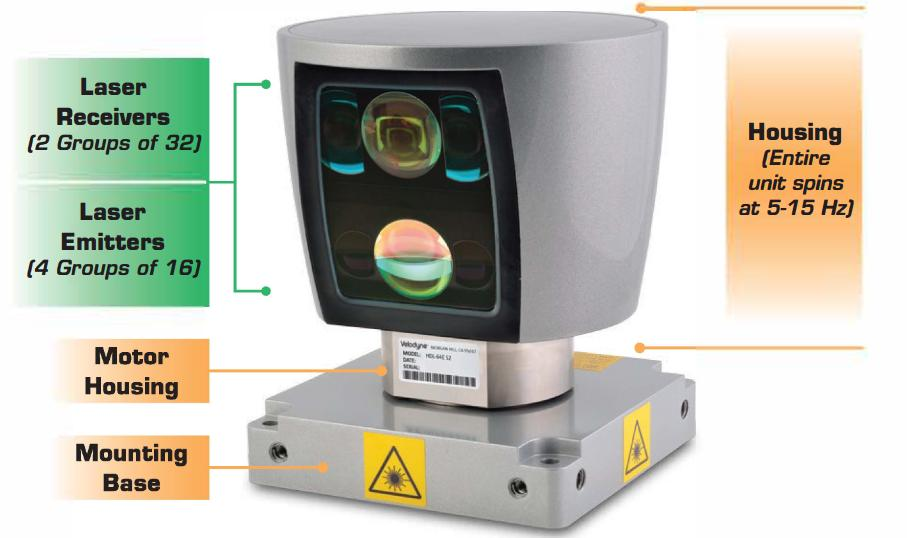
以 Velodyne 的 HDL-64E 为例,把 4×16 个激光发射器垂直堆叠,整个单元持续旋转,发射器(Emitters)和接收器(Receivers)的旋转是物理意义上的旋转,水平方向通过旋转使激光的点变成线,垂直方向排列多个激光发射器以组成面,由此得到3D信息。由于高频机械运动,导致它的寿命大约在1000h~3000h,远低于车厂要求的13000h。

半固态 MEMS
Micro Electro-Mechanical System,将机械结构通过微电子技术集成到硅基芯片上,硅基芯片上集成了体积十分精巧的微振镜,控制微小的镜面平动和扭转往复运动,将激光管反射到不同的角度完成扫描,而激光发生器本身固定不动,不过并没有完全取消机械结构。
半固态 二维转镜
转镜Lidar的扫描镜是围绕着圆心旋转,MEMS则是围绕着某条直径上下振动。相比之下,转镜式激光雷达的功耗低,散热难度低,因而也有较高的可靠性。
固态 OPA
光学相控阵 Optical Phase Array。
激光雷达发射的是光,光具有波粒二象性。波与波之间会产生干涉现象,控制相控阵雷达平面阵列各个阵元的电流相位,相位差让不同的位置的波源产生干涉(类似水波叠加),从而指向特定的方向,往复控制便得以实现扫描效果。
固态 FLASH
泛光面阵式 Flash 激光雷达是目前纯固态激光雷达最主流的技术方案。不像MEMS或OPA的方案会去进行扫描,而是短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器,来完成对环境周围图像的绘制。
总结
LIDAR 参数
线数
波长
常见905nm 和 1550nm两种。 1550nm的更贵,因其功率更大,还解决了 905nm 雨雾穿透力差的问题,恶劣天气的探测距离会更长。此外,1550nm 的激光对人眼安全,不会损伤视网膜。
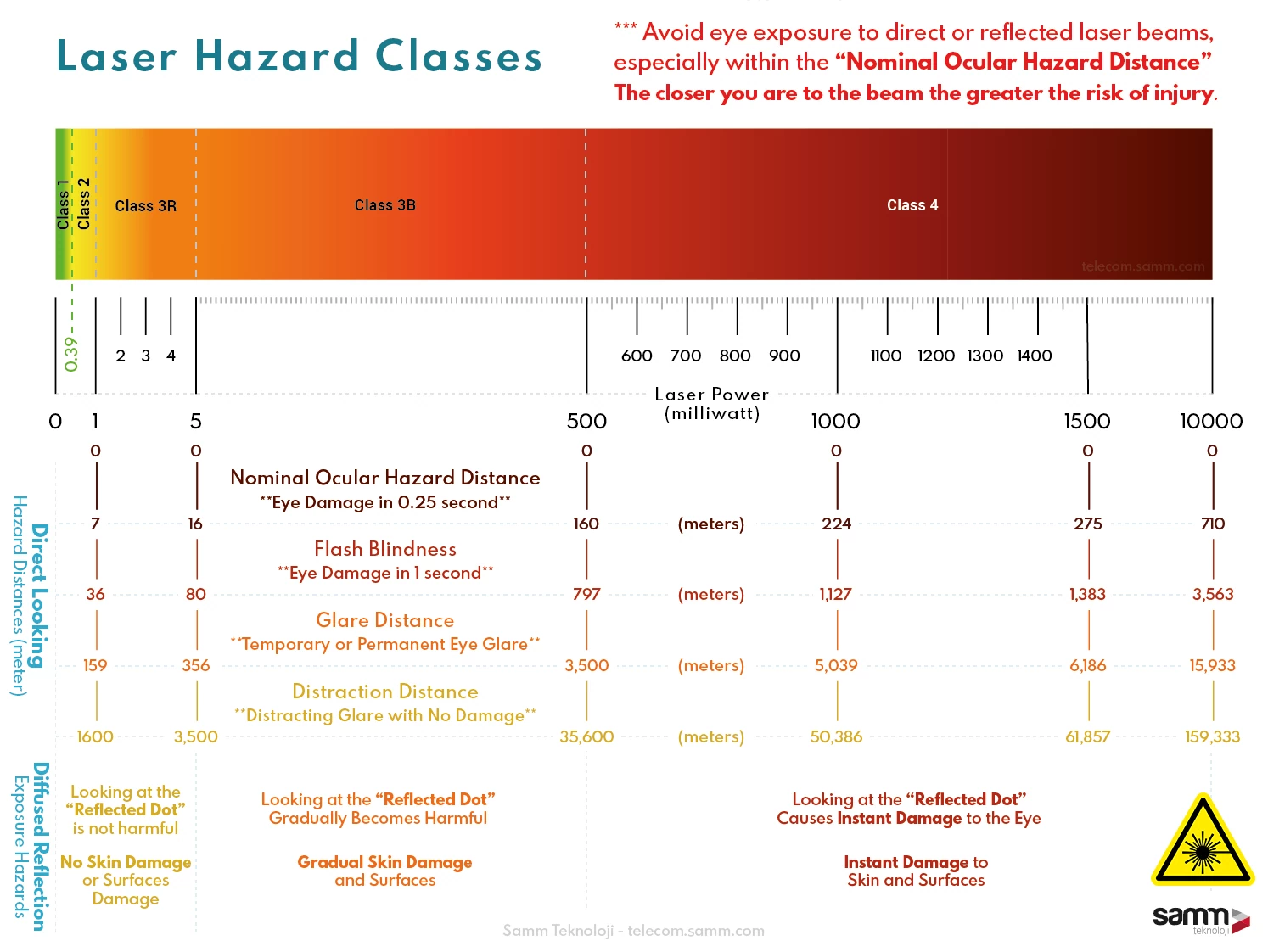
激光安全等级
车载激光雷达要求Class 1。
测距能力&盲区
参数列表中会写 “200m@10%反射率”。意为Lidar在200m的距离上能看清10%反射率的物体。
一般视野范围外皆为盲区,但是距离太近也会产生盲区,有些Lidar在物体紧贴时仍能检测,但是有些Lidar在零点几米内就无法成像了。
FOV
- VFOV:通常25°,形状呈扇形。
- HFOV:机械式激光雷达可达360°;半固态激光雷达可达120°,形状呈扇形。
- 偏置:假设偏置为5°,Lidar在水平方向向上的扫描角度为15°,在水平方向往下扫描的角度为25°。一般都会向下偏置,因为天空的物体不需要关心。
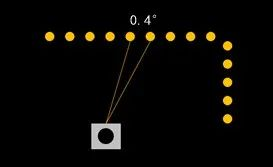
角分辨率
激光雷达相邻两个探测点之间的角度间隔,分为水平角度分辨率与垂直角度分辨率。
角分辨率大小决定了一次扫描能返回的样本点数以及该激光雷达所能检测的最小障碍物大小,比如 2 个激光光束相邻测距点的角度为 0.4°,那么当探测距离为 200m 的时候,2 个激光光束之间的距离为 。也就是说在 200m 之后,只能检测到高于 1.4m 的障碍物了。
帧率
一秒内雷达进行多少次扫描,单位为Hz。扫描频率越快实时性越高。
出点数
即周期采集点数。这个参数也被称为水平分辨率,比如某FOV为360°的激光雷达的水平分辨率为 0.2°,那么扫描的点数为 ,旋转一周将会产生1800个点。
全部点数为:
LIDAR 数据
Point Clouds
反射强度
反映生成某点的Lidar脉冲回波强度的一种测量指标(针对每个点而采集)。
发射功率
接受机孔径
物体表面反射率
入射角
距离
系统反射率
大气传输率
激光点的反射率和距离的平方成反比,和物体的入射角成反比。入射角是入射光线与物体表面法线的夹角。
时间戳
LiDAR 从硬件层面支持授时,硬件trigger触发Lidar数据,并给这frame打上时间戳,一般Lidar支持三种时间同步接口:
- IEEE 15882008同步,以太网对测量以及系统控制实现精确的时钟同步。
- PPS脉冲同步,脉冲同步通过同步信号线实现数据同步
- GPS同步:PPS+UTC,同步信号线+UTC(GPS)时间实现同步。
参考文章
[1] https://www.nidec-components.com/cn/featuring/lidar-polygon/whats_lidar/
[2] https://zhuanlan.zhihu.com/p/139350599
[3] https://blog.csdn.net/Feng_ZhiHua/article/details/132166869
[4] http://www.autopilotexpo.com/news2.asp?id=1525